
 产品:8
产品:8
 联系我们
联系我们

挑战:
欧特克主要研发建筑业常用软件,并希望通过研发,打造全新的解决方案,实现客户与机器人的紧密合作,完成只有人机协作才能执行的任务。虽然制造供应链允许较小的产品公差,但在施工中所用部件的差别通常较大,这就给自动化解决方案的可重复性和处理性能带来了挑战。传统的工业机器人常常需要安装防护罩,而且只能专门执行一项任务,所以想要在高低不平的建筑工地上移动一台机器人,并将其用于不同的任务绝非易事。

解决方案:
欧特克机器人实验室正在利用优傲机器人的协作机械臂(cobot)来解决人机交互、机器学习、绘图和智能装配系统等研究项目中的这些挑战。近期的四个项目包括:
蜂巢馆——人机交互
蜂巢是由竹子和纤维条组成的建筑,是Autotek大学、斯图加特计算机设计***(ICD)、Autotek机器人实验室和Unio机器人技术联合开发的项目。其目的是让用户体验到机器人制造、可穿戴设备、RFID跟踪和嵌入到与建筑无缝集成的智能设备中的建筑组件的无穷乐趣。这是一个艰巨的挑战。竹材质地不均匀,易弯曲,长、宽各不相同。“一开始,我们不确定多少我们可以使用机器人来帮助理解任务的不确定性和变化,”希瑟解释说那天,Autodesk机器人实验室高级研究工程师,我们非常自豪,我们已经安装了传感器,使机器人能够做出决定和采取相应行动的力量。”
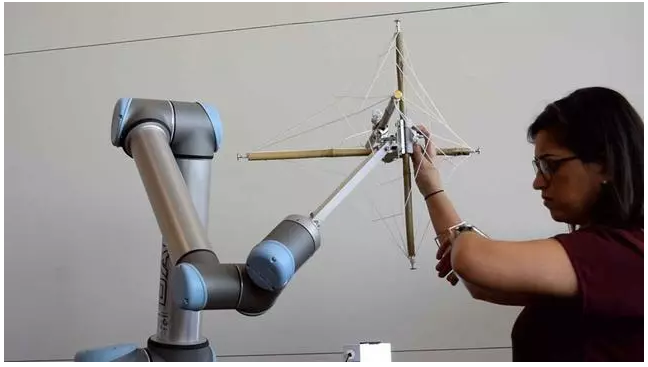
蜂巢亭建在一个“弯曲的站”上,参加者随机将三根竹子连接到一个Uao机器人上,机器人通过一系列必要的动作将纤维钩在竹子的顶部,创造出一个像tumbler grass一样独特的张力单元。“机器人的动作和测量非常***,这对于人类在现场操作是很困难的,因此不需要使用很多测量工具和设备,”Kerrick说,他强调了安全性。“我们正在进行实验研究,机器人运动基于实时传感器数据,所以机器人可能会做一些我们意想不到的动作,“解释那天,添加,如果当时她的团队采用更多的工业机器人,它们不能以同样的方式为公众参与,并将减缓研究项目的进展。“但有了Oko,我们在研究中可以更有攻击性,因为我们相信机器人不会自我毁灭,也不会对他人构成危险。”Autodesk团队在三天内成功地建造了蜂巢亭。

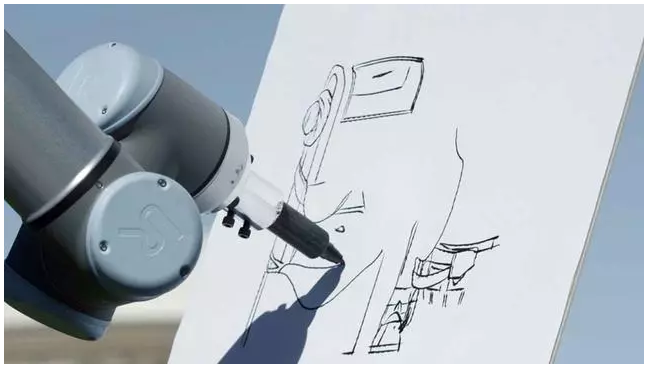
矢量绘图-机器人沿路径运行
UR10 机器人能够在无安全保护的情况下在开放空间里进行操作,这也让它在由欧特克研究工程师 Evan Atherton 制作的大热微电影《恋爱中的阿图》(Artoo in Love)中客串了一把。电影中,优傲机器人 UR10 在公园里画肖像画。“带机器人到这个未知的地方是个很有趣的挑战,”Atherton表示。他和同事们一起校准机器人,编写了一个简单的程序,指导机器人沿着投影在画布上的矢量图路径前行。“UR10设计***:它不仅小巧灵活,而且十分安全。我们可以把它放在 Pelican 安全箱中带出去。要是换成传统机器人,就得需要一辆叉车和防护罩,这显然是不可行的。”他继续道。
机器人灵活协助建筑工地作业
鉴于优傲机器人内置的安全功能,欧特克还开发出了一款用于建筑工地的“机器人助手”原型,它可以方便地在建筑工地上移动。研究团队在机械臂末端安装了一个路由器,还装了一个摄像头和投影机,并开发了机器学习软件,使机器人能够识别人类的手势和语音命令。例如,UR10可以爬上一面干墙,在墙壁上投影出一个出口,用户则可以对其进行修改,然后用语音命令通知 UR10 继续执行开孔操作。

智能装配系统
欧特克利用优傲机器人研究解决的另一个建筑挑战是开发一款与Brick-Bot铺砖机器人协作的智能装配系统。该系统主要解决三个子问题:分拣、重新抓取和放置。通过视觉引导,机器人可以在不同尺寸和颜色的砖块中挑出一块预先确定的砖块。如果砖块的抓取姿势不对,UR10 会进行视觉检查,调整位置并重新抓取,直到砖块正确地放置在夹爪中。至后的放置操作则由另一台优傲机器人——UR5,通过摄像头检查砖块装配。“下一次迭代就是开始实际的设计装配,例如乐高房子或玩具长颈鹿,让机器人自动把它们建起来,”欧特克软件架构师 Yotto Koga解释说,并强调了员工与机器人协作的必要性。“我们选择优傲机器人的一大主要原因就是其安全性。我可以把机器人连接至我的笔记本电脑,并在它旁边工作,然后快速地进行实验迭代,而无需担心安全协议会拖慢进程。这将有助于我们取得重大的项目进展。”
优傲机器人的开放 API 也能够助力进程的快速推进。“通过在 TCP 通信协议上使用流API,我们能够对优傲机器人进行低层级控制,这将满足我们的特殊需求——因为我们需要绕过机器人自己的操作系统直接访问机器人。”软件架构师解释说。他的同事 Heather Kerrick 也讲述了机器人开放架构对蜂巢项目的积极影响。“构建蜂巢需要在团队和设备之间使用不同的编码语言和环境,我们可以将所有的命令简化成单一字符串,然后发送给机器人。”她说道。对于我们部署的大型工业机器人,想要避开机器人内置的本地控制通常需要采取额外步骤或使用额外的软件,但优傲机器人就不需要这样。学习和使用优傲机器人的脚本语言也极为简单。”
了解更多优傲机器人